Why Dust Is One of the Most Complex Problems in Off-Highway Autonomy

Autonomous industrial vehicles have become highly effective at detecting obstacles and navigating complex environments. However, in mining, quarrying, construction, and agriculture, an enduring challenge continues to hinder perception performance:
Dust.
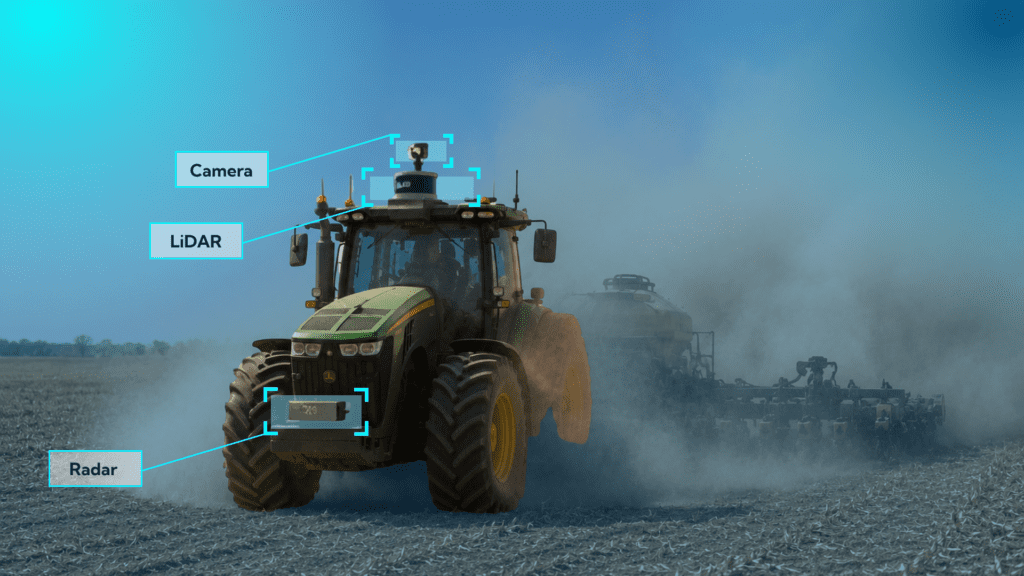
Unlike in structured urban settings, off-highway vehicles frequently operate within self-generated dust clouds. Haul trucks, excavators, wheel loaders, and autonomous utility vehicles disturb fine airborne particles that directly affect different sensors (cameras, LiDAR, radar systems), and sensor housings.
The industry’s typical response has been to enhance perception models by increasing training data, improving neural networks, and developing more advanced filtering.
But field experience increasingly shows that many autonomy failures in dusty environments originate before data ever reaches the AI stack.
When dust contaminates optical surfaces, creates false LiDAR returns, attenuates signals, or blinds sensors, no amount of model tuning can recover information that was not captured correctly. The most reliable autonomous systems address dust as a sensor architecture and system design challenge, rather than solely a perception software issue.
Dust Affects Every Sensor Modality Differently
Dust is often regarded as a challenge primarily for LiDAR-based perception systems; however, it can significantly affect other sensing modalities as well.
- Cameras – Lens contamination, occlusions, laser wavelength shifts, and refractions
- LiDAR – point cloud corruption due to scattered and/or attenuated laser signal
- Radar – Signal attenuation from surface contamination, target detection performance degradation in dense particulate environments
- Sensor Fusion Systems – Cross-sensor disagreement and confidence degradation
Cameras: Dust Degrades Information Before Perception Begins
Camera systems remain fundamental for object classification, semantic understanding, and visual localization. However, cameras are highly dependent on optical clarity.
Dust can impact cameras through:
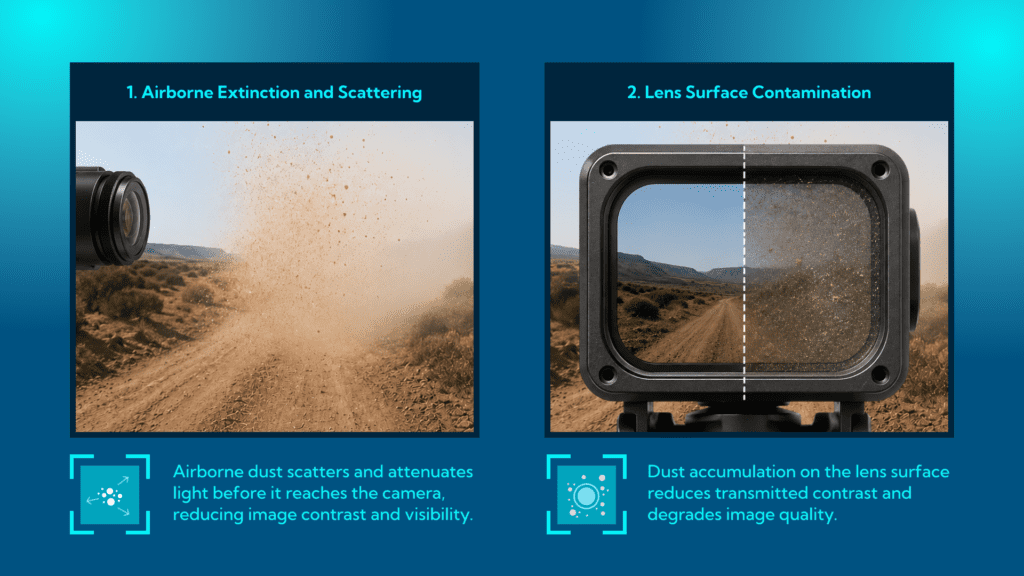
1. Airborne Extinction and Scattering
Suspended dust particles attenuate and scatter light along the optical path, reducing image contrast and obscuring scene details before light reaches the imaging sensor.
Increasing dust concentration leads to progressively lower image contrast and reduced visibility. These effects directly impact downstream perception algorithms by decreasing the quality of visual information available for object recognition and localization.
2. Lens Surface Contamination
Dust accumulation on camera windows or protective optical surfaces further degrades image quality by reducing transmitted contrast.
Model Improvements Have Limited Impact
A perception model can compensate for moderate image degradation but it cannot recover lost contrast, severe lens contamination, or obscured fields of view.
Consequently, camera reliability in dusty operations depends heavily on protective optical windows, air-knife systems, positive-pressure housings, automated cleaning mechanisms, and strategic sensor placement rather than perception software alone.
LiDAR: Dust Creates False Reality
LiDAR is often considered a robust sensing modality in dusty environments, but dust can still introduce spurious measurements and lead to incorrect environmental representations.
The reason lies in the operating principle itself.
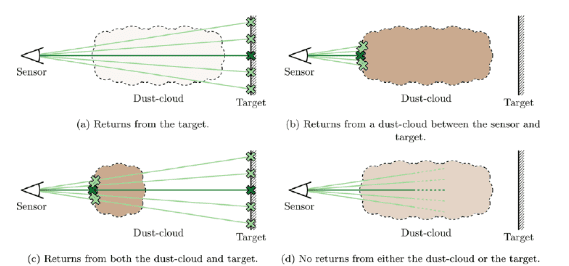
LiDAR actively emits laser pulses and measures reflected energy and dust particles become unintended reflectors. Instead of observing the environment, the sensor begins observing the dust cloud.
A study examining LiDAR behavior in dusty environments identified multiple distinct response modes when airborne particulates are present, demonstrating that dust can fundamentally alter measured scene geometry.
Why Better Dust Filtering Is Not Enough
LiDAR perceives dust particles as solid objects, which isn’t their true nature. In autonomous excavation environments, these false returns can be misclassified as obstacles, potentially leading to unnecessary avoidance maneuvers and unsafe or inefficient vehicle behavior.
Researchers have developed various dust-filtering techniques, such as intensity-based filtering, geometric outlier removal, machine learning classifiers, and deep learning methods. In a study on RGB-LiDAR sensor fusion for dust de-filtering, sensor fusion approaches combine LiDAR and RGB camera data to improve dust identification and filtering. These methods improve perception by combining information from different sensors.
However, the need for more sophisticated filtering highlights a broader issue: dust is a physical phenomenon that interferes with sensor measurements. Since significant processing is needed just to distinguish airborne dust from real obstacles, it increases complexity and computational demands.
So, autonomous off-highway work in dusty environments requires more than software filtering. It needs better sensor resilience.
Radar Is More Dust-Tolerant but Not Dust-Proof
Radar is often presented as the answer to adverse environmental conditions, and there is a good reason for that.
Millimeter-wave radar generally experiences significantly less degradation from airborne dust than optical systems because longer wavelengths are less sensitive to small particles.
Studies examining millimeter-wave propagation through dust have shown relatively low attenuation compared with optical sensing technologies.
However, radar is not immune to the effects of adverse environmental conditions.
Surface Contamination Matters
A research examining automotive radar sensors found that dust contamination on sensor surfaces can affect signal transmission and object detection performance, particularly when contaminants contain moisture. Higher water content resulted in increased signal attenuation and reduced detection capability.
Dense Dust Environments Can Still Create Challenges
Recent work on 4D radar perception in mining-like environments demonstrated that dust and environmental clutter can contribute to noise, ghost targets, and multipath effects that require dedicated filtering strategies.
The implication is important: radar increases robustness, but it should not be treated as a standalone solution.
Sensor Fusion Helps, but Architecture Matters More
Sensor fusion is often positioned as a key approach to mitigating environmental uncertainty.
In reality, sensor fusion is only as effective as the diversity of failure modes among its constituent sensors.
A camera and LiDAR mounted beside each other may both become impaired by the same dust cloud and a radar mounted in the same location may continue operating.
This creates a critical design principle: reliability comes from failure independence.
The goal is not simply adding sensors. The goal is adding sensors that fail differently.
A resilient autonomy architecture should combine cameras for classification, LiDAR for geometry, and radar so that no single environmental condition disables perception completely.
Research comparing LiDAR, radar, and depth-camera performance under challenging sensing conditions found substantial differences in robustness across sensing modalities, reinforcing the value of heterogeneous sensor architectures.
The Most Effective Dust Mitigation Strategies Occur Outside the AI Stack
Organizations seeking higher autonomy uptime in dusty operations should prioritize system-level interventions.
Sensor Placement
Mounting sensors away from major dust generation zones reduces contamination rates, lowers cleaning frequency and reduces false returns.
Sensor Cleaning Systems
Modern autonomous vehicles increasingly incorporate fluid cleaning systems, automated wiping mechanisms, and contamination detection to ensure optimal sensor function.
Environmental Hardening
Other physical measures to reduce both contamination ingress and long-term sensor degradation are sealed enclosures, ruggedized optical windows, and vibration isolation.
Sensor Diversity
As mentioned, deploying sensors with different physical sensing mechanisms reduces common-mode failure risk and improves operational safety.
Is Dust-Resilient Autonomy the Future?
Dust remains a complex challenge in off-highway autonomy because it affects the entire perception stack at once.
Unlike other environmental factors that typically affect only one sensor type, dust can reduce camera visibility, cause false LiDAR returns, contaminate sensor surfaces, lower detection performance, and create conflicting inputs across perception systems. This challenge is intensified because industrial vehicles often generate the dust clouds they must navigate.
That’s why dust cannot be addressed by perception algorithms alone. When sensors cannot capture reliable data, even advanced AI models must make decisions using incomplete or corrupted information.
The industry’s next leap in autonomy reliability is unlikely to come solely from larger neural networks or more sophisticated perception models.
Instead, it will come from the fact that environmental robustness begins at the sensing layer.
The organizations achieving the highest autonomy uptime in mining, construction, and industrial mobility will be those that design for dust from the beginning:
- Selecting complementary sensor modalities
- Engineering contamination management systems
- Optimizing sensor placement
- Building redundancy into perception architectures
- Treating cleaning and maintenance as part of the sensing system itself
In dusty industrial environments, system performance is largely determined before AI processing begins, at the level of sensor selection and perception design.