Are Self-Driving Freight Swarms the Future of Autonomous Hauling?

Freight swarms are not robotic insects carrying cargo.
They are coordinated systems where fleets of autonomous vehicles move as one, optimizing how freight flows in real time.
While this concept is still in its early stages, it points toward a future in which haulage systems operate as intelligent, connected networks rather than isolated vehicles.
Currently, freight transport is indispensable to modern industry, but it faces significant challenges. Labor shortages, increasing costs, strict safety requirements, and environmental concerns all show the limitations of traditional models that rely on large vehicles operated by human drivers.
Autonomous vehicle technology has moved beyond experiments and is now being used in real-world settings. For instance, Volvo Autonomous Solutions at Brønnøy Kalk uses driverless trucks that have already moved over one million metric tons of limestone in demanding industrial conditions.
The real transformation goes beyond individual autonomous vehicles, focusing instead on rethinking how entire fleets operate, leading to the concept of freight swarms.
What Is Swarming in Robotics?
A swarm robotics system is a coordinated network of autonomous, often smaller machines that operate collectively as a unified system rather than independently. While a single autonomous robot can complete tasks, swarms of robots add intelligence at the fleet level.
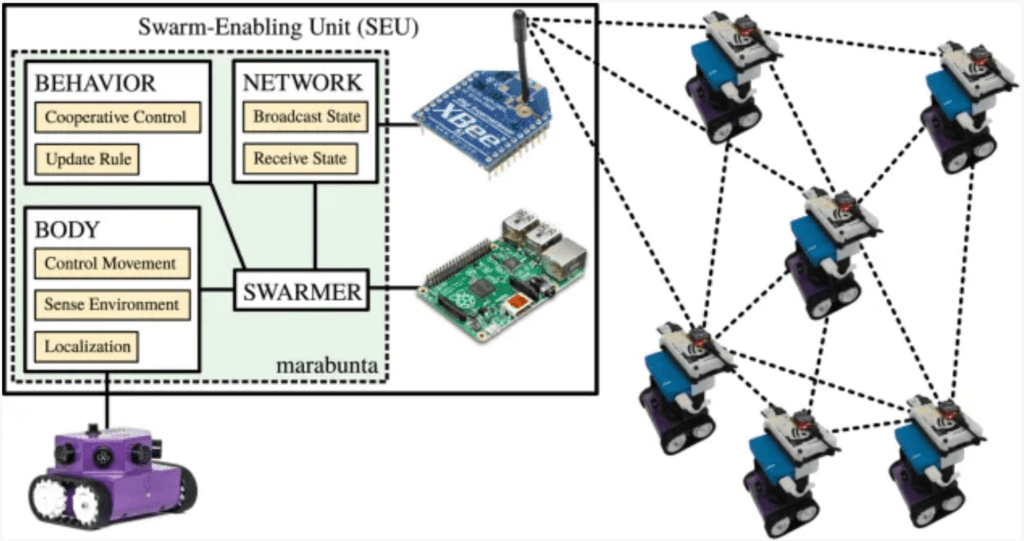
Swarming in robotics. Taken from Chamanbaz M, Mateo D, Zoss BM, Tokić G, Wilhelm E, Bouffanais R and Yue DKP (2017) Swarm-Enabling Technology for Multi-Robot Systems. Front. Robot. AI 4:12. doi: 10.3389/frobt.2017.00012
The same can apply to the logistics and trucking industry. Rather than acting independently, vehicles in a freight swarm continuously interact, share information, and adapt to different conditions. This results in coordinated automated operations and creates a more flexible, resilient, and efficient freight transport model.
Transitioning from Individual Autonomy to Collective Intelligence
Early autonomous hauling replaced drivers with single automated systems. Freight swarms are the next step:
- Individual autonomy → a truck drives itself.
- Freight swarm → multiple trucks coordinate and optimize as a group.
This shift reframes hauling as a systems challenge rather than a vehicle-specific issue, with their performance formed by the key characteristics of swarm systems:
- Real-time coordination: Vehicles share data on position, speed, and route to synchronize movement and reduce inefficiencies.
- Collective decisions: Routing, spacing, and task allocation are optimized across the fleet, not just for individual vehicles.
- Adaptability in real time: The system can quickly respond to disruptions such as delays, obstacles, or changes in demand.
- Continuous operation: Autonomous fleets can operate continuously, maintaining consistent flow without human-related interruptions.
How freight swarms operate in practice
In nature, swarming intelligence is often compared to schools of fish, flocks of birds, or insect swarms where no single agent controls the whole group. Instead, efficiency comes from simple interactions at scale. The same principle applies to swarming in logistics, warehousing, or mining.
Operationally, self-driving freight swarms shift from a few large, independently managed trucks to a more distributed approach:
- A larger number of smaller autonomous vehicles
- Central or hybrid fleet orchestration systems
- Continuous communication between vehicles and infrastructure
- Coordinated loading, hauling, and unloading processes
Traditional Hauling: How the Conventional Model Works and Its Challenges
Traditional hauling models in mining, quarrying, and freight logistics are based on a stable structure. It primarily uses a small fleet of high-capacity vehicles, operated and coordinated by human drivers and dispatch teams. But these systems present a few notable challenges that determine their efficiency.
- A limited number of large vehicles
High-capacity trucks maximize payloads and reduce the number of trips needed to transport materials or goods. While this improves efficiency per trip, it concentrates operational capacity in fewer vehicles. Consequently, each truck is critical to output, and any downtime can significantly affect performance.
- Human drivers
Each vehicle requires a dedicated driver, making labor essential to the hauling model. Fleet size is directly tied to workforce requirements, so scaling depends on recruiting and retaining drivers. These factors can cause performance to vary because of differences in skill, experience, and fatigue. At the same time, keeping human operators in demanding or hazardous environments increases exposure to risk, whereas autonomous swarm transport in these areas can help lower the likelihood of accidents and improve overall safety.
- Unpredictable economics
Transportation is inherently cyclical and closely tied to broader economic conditions, and in recent years, companies have had to navigate disruptions ranging from the global pandemic to supply chain breakdowns, inflation, and rising interest rates. As Michael Browne, a professor at the University of Gothenburg suggests, while businesses cannot control macroeconomic forces, they can improve resilience by focusing on operational efficiency and optimizing areas in the trucking industry such as fuel use, routing, and performance during both downturns and periods of growth.
- Fixed routes or dispatch routines
Vehicles typically follow predefined routes or schedules, with limited real-time adaptability. Although routes are optimized in advance, they can become inefficient during disruptions. Delays, congestion, or changing demand are difficult to manage dynamically.
- Manual fleet coordination
Human planners manage dispatching, scheduling, and workload balancing, often with digital tools but still relying on manual decisions. This process is effective but reactive and limited by human oversight and available information. As fleet size and complexity grow, maintaining optimal coordination becomes increasingly challenging and time-consuming.
Why the Model Is Under Pressure
The traditional model is especially prevalent in mining and industrial environments. Hauling operations typically use large trucks to move material along established routes between loading points, such as excavators or wheel loaders, and unloading points, such as crushers or stockpiles. These routes are usually fixed, optimized for heavy equipment, and limited by the size of the vehicles.
Taken together, the characteristics of the model highlight several structural challenges. Traditional hauling systems are highly labor-intensive, relatively rigid in operation, and prone to inefficiencies as complexity increases. They also expose human operators to potentially hazardous environments and lack the flexibility and resilience required to adapt quickly to disruptions.
While these challenges do not render the conventional model obsolete, they make it increasingly difficult to scale and optimize in today’s environment.
From Autonomy to Freight Swarms
Initial efforts in autonomous trucking focused on replacing human drivers with automated systems in individual vehicles, demonstrating that trucks could perceive their environment, follow predefined routes and operate without direct human oversight.
Since then, progress has been slower than expected, partly due to technological limitations and safety concerns, with most deployments still centered around lower levels of automation. In practice, autonomous trucking systems have proven most reliable in controlled environments such as mining sites, where conditions are more predictable and manageable. While these deployments show that continuous, driverless operation is possible, broader adoption on public roads remains constrained by cost, performance and safety challenges.
However, vehicle-level autonomy is only the foundation. The next phase focuses on how machines interact. Rather than optimizing individual trucks, the challenge is to coordinate multiple vehicles for efficient joint operation.
In this phase, fleets of autonomous vehicles operate as parts of a larger, connected system. Vehicles share data, adapt to each other’s actions, and respond collectively to changing conditions. Dispatching, routing, and workload distribution shift from static planning to dynamic, real-time orchestration.
A similar shift can be seen in Einride’s example, where autonomous, cabless trucks are coordinated through its Saga platform, an AI-driven system that manages routing, monitoring, and fleet optimization in real time. The main benefit of this system-level orchestration, as seen in deployments in Sweden and at the Port of Antwerp-Bruges, is that it enables reliable autonomous freight operations beyond controlled environments.

Source: Einride’s fully autonomous heavy-duty truck
Volvo Autonomous Solutions and the Emergence of Freight Swarm Logic
Volvo Autonomous Solutions’ work at Brønnøy Kalk illustrates freight swarm principles in practice. Although not labeled as a freight swarm, the deployment demonstrates many of its key features.
At Brønnøy Kalk, autonomous Volvo FH trucks operate continuously along a fixed 5km route between the mine and the crusher, navigating steep inclines and tunnels. By 2025, the system had transported over a million metric tons of limestone using multiple driverless vehicles. These trucks operate within a coordinated system that integrates vehicle movement, loading operations, and site control.
The system also reflects a broader shift toward fleet-level thinking. As Björn Gröndahl of VAS explains, autonomy enables operations to move “from a few large trucks to smaller vehicles, much like a school of fish fluidly navigating the waters.” This analogy captures the essence of freight swarm logic: efficiency emerging from coordination rather than from individual vehicle capacity.
This coordination is essential in constrained environments, such as narrow tunnels where vehicles cannot pass each other. Timing and synchronization maintain flow and prevent delays. Continuous communication and monitoring enable system-level management of vehicle movements and workloads.
But can deployments like Volvo’s realistically scale beyond controlled environments, and do the benefits justify the added complexity of coordination?
The Benefits of Freight Swarms
Transitioning from individual autonomous vehicles to coordinated freight swarms creates a new operating model focused on system-level performance. Freight swarms deliver capabilities beyond those of traditional hauling.
Better efficiency
Freight swarms optimize routes and dispatch in real time, enabling vehicles to adapt to changing conditions. This reduces idle time, minimizes bottlenecks, and maintains a steady flow of goods. Coordinated fleet movements significantly improve utilization compared to manual systems. As Björn Gröndahl of Volvo Autonomous Solutions notes, this approach allows fleets to operate “much like a school of fish fluidly navigating the waters,” emphasizing that efficiency results from coordination rather than individual performance.

Source: VAS autonomous trucks
24/7 operation
Autonomous fleets operate continuously without interruptions from breaks or shift changes. This ensures consistent throughput and higher productivity, especially where downtime affects output. Continuous operation also enhances predictability, making planning and scheduling more reliable.
Lower labor dependency
Autonomy eliminates the need for a driver per vehicle, allowing operators to scale fleets without increasing workforce size. This is especially valuable where labor is scarce, costly, or difficult to retain. It also reduces workforce variability, resulting in more stable and predictable operations.
Greater resilience
Freight swarms use more, smaller vehicles, which distributes operational risk. If one vehicle is unavailable, the impact on capacity is limited compared to systems relying on a few large trucks. As Gröndahl notes, losing one vehicle in a larger fleet causes only a minor reduction in capacity, greatly improving reliability.
More flexible fleet design
Smaller autonomous vehicles are easier to reposition, reassign, and balance across different sites. Fleet size can be adjusted quickly in response to demand, allowing operators to scale without major structural changes. This flexibility supports adaptive operations, especially where workloads or material flows vary.
Environmental gains
Freight swarms reduce the physical and environmental footprint of hauling. Smaller vehicles require narrower roads, lowering infrastructure demands and site impact. Precise, coordinated movement improves energy efficiency, while optimized routing reduces fuel consumption.

The Technologies That Make Freight Swarms Possible
Self-driving freight swarms result from the integration of several advanced technologies, rather than a single breakthrough. While each component has been proven in autonomous vehicles, their true value lies in supporting coordinated, fleet-level operations.
Sensor fusion
Freight swarms use advanced perception systems based on sensor fusion at the vehicle level. These systems combine data from lidar, radar, cameras, GNSS, and inertial measurement units to deliver reliable, real-time environmental awareness.
In the Volvo Autonomous Solutions deployment at Brønnøy Kalk, autonomous trucks use 3D and 2D sensors, radar, and lidar to detect obstacles and navigate open areas and tunnels. Combining these inputs addresses individual sensor limitations and enhances accuracy and reliability, particularly in low-visibility or confined spaces.
Vehicle communication
Freight swarms require continuous communication between vehicles and their environment. Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2X) links enable trucks to share information on position, speed, planned routes, and system status.
At sites such as Brønnøy Kalk, private networks connect vehicles to site control systems. Reliable connections are essential for coordinating movement in confined spaces, where timing and teamwork impact safety and efficiency. Without this communication, true swarm behavior is not possible.
Fleet orchestration systems
Sensor fusion lets each vehicle operate on its own, but fleet orchestration systems bring swarm intelligence to the group. These systems control dispatching, routing, spacing, and how work is shared across the fleet.
Instead of static schedules, orchestration platforms continuously adjust operations using real-time data. They balance vehicle utilization, coordinate loading and unloading cycles, and prevent congestion. This transition from manual dispatch to dynamic orchestration enables a fleet of autonomous vehicles to function as a freight swarm.
Mapping and localization
Accurate mapping and localization are critical for both autonomy and coordination. Freight swarms rely on high-quality digital maps and predefined path networks that define where vehicles can operate safely.
These maps are regularly updated and validated to reflect changes in infrastructure and operating conditions. Vehicles use satellite positioning and onboard sensors to maintain precise localization, even when external signals are unreliable. This accuracy is vital for coordinating movement among multiple vehicles in shared spaces.
Edge intelligence and digital infrastructure
Freight swarms rely on a comprehensive digital infrastructure that supports real-time decision-making and system-wide optimization. Edge computing processes data near the vehicle, reducing latency and enabling faster responses.
Additionally, data logging, analytics platforms, and control systems provide operational visibility. These tools support predictive maintenance, performance monitoring, and continuous improvement. Advanced implementations use digital twin technologies to simulate fleet behavior, enabling operators to test and optimize swarm strategies before real-world deployment.
The Biggest Challenges in Swarming
Freight swarms provide clear benefits, but they also add complexity. The challenge extends beyond making one vehicle autonomous to ensuring that multiple vehicles operate together safely, reliably, and efficiently in real-world conditions. The main difficulty lies in shifting from individual autonomy to coordinated systems.
- Coordination
Coordination is central to freight swarms. Each vehicle needs to understand its surroundings and react to what other vehicles are doing. Just like in other swarm robotics systems, the fleet must communicate all the time, figure out work allocation, and resolve safety and security problems, all the while using coordination algorithms.
In traditional hauling, each truck mostly works on its own. In swarming, the trucks depend on each other. If one vehicle is delayed, makes a mistake, or miscommunicates, it can impact the whole group. Making sure things like merging, spacing, loading, or changing routes go smoothly gets much harder as more vehicles join the system.
So, the challenge is not only technical. It is also about keeping the whole network of moving, interacting machines stable and efficient.
- Real-world environment
These coordination challenges are even more pronounced in real-world environments, where conditions are rarely ideal.
In deployments like Brønnøy Kalk, vehicles navigate narrow tunnels where passing is not possible. This demands precise scheduling and synchronization to ensure trucks meet at the correct location and time without delays. Reliable communication infrastructure is essential, as coordination relies on consistent data exchange.
Operational complexity also increases when scaling fleets. Adding a large number of smaller vehicles can create diminishing returns if loading capacity cannot keep pace, meaning any gains in travel time may be offset by delays at loading points.
Environmental factors also impact operations. Moving between outdoor and enclosed spaces can cause sensor condensation or reduced visibility, affecting perception systems. Varying terrain, weather, and operational disruptions add uncertainty that the system must manage continuously.
These examples highlight that freight swarms must operate not only in controlled settings, but also in dynamic, unpredictable environments where variability is common.
- Interoperability
Interoperability is another significant challenge. Many autonomous hauling systems use proprietary technologies and controlled infrastructure within closed environments. This approach simplifies deployment but limits scalability.
To expand beyond isolated sites, freight swarms require seamless communication and coordination among different vehicles, systems, and operators. This depends on common standards for data exchange, communication protocols, and system integration, which are still developing.
Without interoperability, freight swarms may remain limited to specific use cases instead of evolving into a broader logistics solution.
- Scaling freight swarms beyond mining
Currently, the most advanced coordinated autonomous hauling occurs in controlled environments such as mining and quarrying. These settings offer defined routes, limited external interference, and manageable conditions, making them ideal for early deployment.
Scaling freight swarms beyond these environments introduces new challenges. Public roads, mixed traffic, regulatory constraints, and complex logistics networks increase uncertainty and coordination demands. Systems must manage more scenarios, interact with human-driven vehicles, and comply with diverse regulations.
Therefore, achieving large-scale freight swarms requires not only advances in vehicle technology, but also the development of infrastructure, standards, and operational frameworks to support coordinated fleets in open and complex environments.
Ultimately, the challenge is not autonomy itself, but coordination at scale; so the question is: can entire freight systems operate as reliably as the individual vehicles within them?
Are Freight Swarms the Future of Hauling?
Freight swarms shift the focus from individual vehicles to coordinated, system-level intelligence. Early deployments show that autonomous hauling is possible, but scaling it depends on solving complex challenges around coordination, interoperability, and real-world conditions.
If these challenges can be solved, freight could become more efficient, reliable, less dependent on human intervention, and continuously improve based on data.
But can automated freight swarms truly deliver on this promise when faced with the full complexity of real-world operations?